|
CGF Terrain / Route File Creation
Last update: October 22, 2000, by William. List of changes here .
This manual is organized as one big html file to allow you to save it to your own hard
disk for future reference. Do check back the original
page for any updates.
In CGF, terrain files describe the bots how they may navigate a Action Quake 2 map. In
order to play any missions on a particular map, you need to have the terrain files for that map.
The basic information describing the terrain just consists of:
- waypoints, or nodes
A node describes a location that can be visited by the bot, and is annotated with
various 'flags' that inform the bot whether that location is, for example in water,
requires crouching, etc. All these flags are generated automatically once the
node is created.
- connections, or links
A link between two nodes describes a viable direct path from one node to the other
without major obstructions.
A link only describes a one-way path. To describe that you (and the bot) can move
directly from one node to the other and back, two links are required.
Typically, a link depicts a horizontal path between nodes that are about 200 game
units apart. However, a link can depict a 800 unit jump from a cliff down into the
water as well.
Links are not annotated. Instead, the AI figures out what to do (jump, swim, crouch,
open door, shoot breakable glass) based on the flags of the nodes connected by the
link.
The terrain description for an average Action Quake 2 map contains about 750 nodes and 3,600
links (about 800 uni-directional links and 1400 bi-directional links (thus representing two links)).
On average, nodes are connected to 3 other nodes, but in extreme cases up to 20.
Terrain file creation or route file creation is the process of creating a good terrain
description for the bots. The bots really depend on these terrain files for navigation,
but in the case of CGF, also for finding cover, location sniper positions, approaching
a position stealthily, etc.
Note that the CGF bots cannot 'roam' or 'explore' an unknown map themselves. This is
explained in the FAQ.
This manual is organized as follows:
- introduction (this text)
- terrain files (.srp, .dst, .tac, .exp)
- node flags
- terrain mapping commands
- steps to create an initial terrain file
- steps to test and improve the terrain file
- deal with map features that are likely to cause problems
- easy creation of a .cgf script defining locations
- debugging terrain problems in missions
- requirements for CGF terrain file distribution
- additional credits
- change log for this document
CGF uses four kinds of terrain files (in directory action\terrain) to
describe a specific AQ2 map:
- {mapname}.srp, [essential!]
defines the nodes and connections
- {mapname}.dst, [optional, can be reconstructed]
(large file) containing the path lookup table for each pair of nodes.
The presence of this file speeds up map load time by about 5 minutes
- {mapname}.tac, [optional, can be reconstructed]
(small file) containing all kinds of tactical lookup tables
The presence of this file speeds up map load time by about 2 minutes
- {mapname}.exp, [optional, but cannot be fully reconstructed]
(small file) contains and records experience gained from monitoring player/bot
movement and performance.
The presence of this file improves the AI behavior, but does not affect
map load time at all.
In addition, there's a fifth map related file that you better add to your route file
archive:
- {mapname}.fog, [optional, and in directory action\cgf\fog]
(small text file) defines fog preferences for map at hand: fog density, fog type
and fog color (expressed in red, green and blue)
Density is typically low for indoor maps and higher for outdoor maps
(0.0 disables fog, 0.05 is low, 0.20 is dense).
Since the terrain file will enable the gamer to start playing CGF at a specific
map, it makes sense to provide a fog file for that map as well.
The path lookup table and tactical lookup tables are generated by CGF using as input the Quake map,
and the .srp file contents: nodes and links. Therefor, they can only be computed while
running the Quake2 engine. This typically happens during map load time.
Because generating these tables takes about 7 minutes (depending on CPU power and map size),
and because most gamers don't like to wait that long before playing a mission,
CGF computes these tables once, and stores them in (large) files. CGF then reads these files
(thus: tables) at the start of a mission, and launches the mission in about 10 seconds
instead of 7 minutes. The sole disadvantage is that it takes a few MB's of your harddisk.
If you are short on hard disk space, you can remove the .dst and .tac files for the maps
you don't play frequently - this saves up about 2MB per map.
CGF records a number of properties (or flags) for each node. These are determined
automatically either:
- when you start the mapping process
- when you spawn a node, or
- when post-processing the map (before saving, when reconstructing the terrain files).
You'll will be informed of the node's properties when visiting a node. The node
properties will assist you in deciding whether to remove or reposition a node.
Please note that you'd better not remove any nodes that are created when you start
mapping (doors, breakable glass, etc.) because you cannot re-create these manually.
CGF 0.79 records the following properties per node:
|
node property
|
computed
|
description
|
|
id
|
spawn
|
unique node number - may change as a result of node removal, values range from 0 onwards
|
|
lightlevel
|
spawn
|
lightlevel, as recorded during creation. ranges from 0 = dark to 128 = full bright
|
|
'low' flag
|
spawn
|
around node location, crouching is required
|
|
'watershallow' flag
|
spawn
|
location features shallow water (no need to swim, reduced speed, no falling damage)
|
|
'waterdeep' flag
|
spawn
|
location features deep water (need to swim, reduced speed, need to surface to breathe)
|
|
'breathing' flag
|
spawn
|
location is deep water but to surface for breathing
|
|
'ladder' flag
|
spawn
|
location features ladder
|
|
'narrow' flag
|
spawn
|
location features narrow ladder or ledge, thus requires
more precise jumping and movement
|
|
'glass' flag
|
start mapping
|
location features breakable glass
|
|
'elevator' flag
|
start mapping
|
location is elevator stop position [not supported yet]
|
|
'train' flag
|
start mapping
|
location is train stop position [not supported yet]
|
|
'door' flag
|
start mapping
|
location is a normal or rotating door (that can be opened)
|
|
'covered' flag
|
post-processing
|
location enables bot/player to put their back to the wall
and be attacked from 'one' direction (190 degrees) only
|
|
'indoor' flag
|
post-processing
|
location (and its direct surroundings have an indoor location,
and should be tackled appropriately by the forces) [not supported yet]
|
|
'traffic' flag
|
post-processing
|
location is used frequently for movement (and deserves
closer attention) - flag becomes more accurate when playing
more missions on a particular map
|
|
'snipe' flag
|
post-processing
|
location is used succesfully for sniping (and deserves
closer attention) - flag becomes more accurate when playing
more missions on a particular map
|
|
'camp' flag
|
post-processing
|
location is used succesfully for camping (and deserves
closer attention) - flag becomes more accurate when playing
more missions on a particular map
|
To create, inspect and modify terrain information, you can use the
following commands (to learn how and when to use them, see the next section).
All commands are issued from the console (or via a key binding).
All commands are prefixed by 'terrain' and need to provided with the appropriate
argumeents. Thus the 'show infront' command should be entered as, for
example:
terrain show infront 30
The commands are:
|
command
|
description
|
|
help
|
displays summary of terrain commands
|
|
map
|
Toggles node creation (if node creation is toggled on, and linking wasn't on, linking will be enabled as well).
Note: the first time node dropping is toggled on, a node (node 0) is dropped
at your position, and all doors and breakable glass are given nodes as well.
When display node is enabled, new nodes will show up as red balls.
Whenever node dropping is toggled off, map post processing is done
(to remove some incorrect nodes and links, and to compute label information
for each node). This takes some serious time.
|
|
link
|
Toggles link creation. Node creation need not be on. Link creation is automatically
enabled when enabling node creation using terrain map.
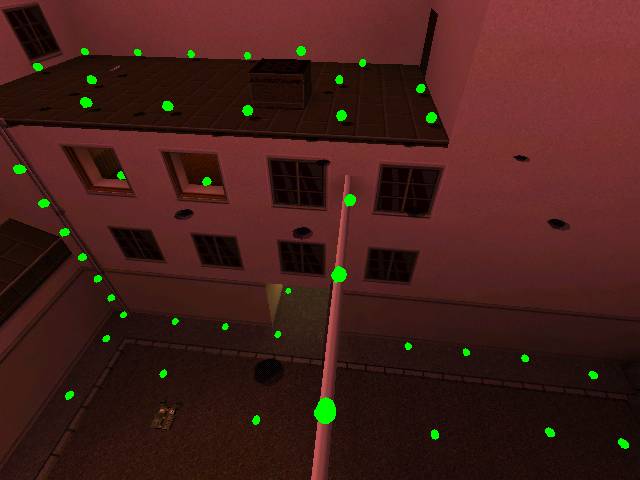
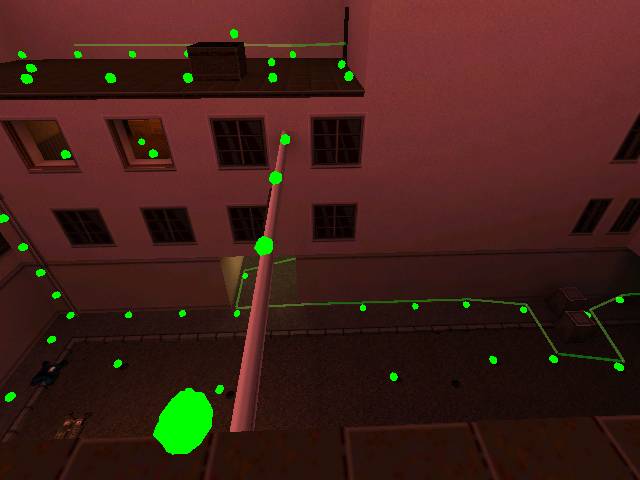
When display link is enabled, new links will show up as rail gun traces (un-directional links)
or green laser lines (bi-directional links).
|
|
log visit
|
Toggles reporting of node information. When enabled, the node properties are listed. The
following abbrevations are used in the reported information: 'd' is defensive value, 'l' is
lightlevel, 'o' is occupation score 'm' is movement score, 's' is sniping score,
'c' is camping score.
Note: you need to have 'log visit' enabled to use the 'terrain show' commands.
|
|
log create
|
Toggles reporting the creation of any link or node (tells if a node is created,
and if two nodes are linked. In the latter case, the distance, expressed
as travel time in seconds id displayed).
Since the 'display node' and 'display link' options suffer from the Quake2 entity limit,
I typically have 'log create' enabled to see whether links and nodes are being created.
|
|
display node
|
Toggles displaying of nodes (by red balls). Nodes remain only
visible for about 60 seconds. Quake2 has troubles handling too many entities.
Since each nodes and link are displayed using one entity each, Quake2
soon will start complaining.
For that reason, if there are already too many waypoints present in the map to be
displayed at all, none of them are displayed initially, and solely new
nodes will be displayed.
|
|
display link
|
Toggles displaying of links by rail gun traces (uni-directional or one-way links)
and green laser lines (bi-directional or two-way links).
Links remain only visible for about 60 seconds. Quake2 has troubles handling too many entities.
Since each nodes and link are displayed using one entity each, Quake2
soon will start complaining.
For that reason, if there are already too many links present in the map to be
displayed at all, none of them are displayed initially, and solely new
links will be displayed.
|
|
save
|
Performs post-processing of the map (removing incorrect links, updating description info)
and saves the route info to action\terrain\<map>.srp.
|
|
manual drop node
|
Drops a new node at the player position and automatically creates all safe links for
neighboring nodes to / from this new node (whether terrain link is enabled or not).
Make last created node also the last visited node.
|
manual delete node
or
manual delete node <nodeid>
|
Removes the specified node (or the last visited node if no node id was given - use terrain log visit
to know which node was last visited), and
assigns the last created node the id of the deleted node.
Therefor, don't count on node numbers to remain the same if you use manual delete node.
Solely node 0 cannot be removed using 'terrain manual delete node 0' - you need to
actually visit this node to remove it.
Note that, though you removed a node, the visual representation (red or green ball) that might have
been created won't disappear until the time out occurs.
|
|
manual link <nodeid> <nodeid>
|
Creates a one-way link from first node to second node (only - reverse the node numbers to create the link back).
If the link didn't exist before, it reports the calculated travel time from the first to second node.
Example:
terrain manual link 130 134
|
|
manual unlink <nodeid> <nodeid>
|
Removes the one-way link from first node to second node (only - reverse the node numbers to remove the link back).
Example:
terrain manual unlink 130 134
Note that, though you removed a link, the visual representation that might have
been created won't disappear until it's time out.
|
|
stats
|
Dumps terrain statistics on the console. This is the same information you
see when a map is loaded.
|
|
export
|
Exports 'comma separated file' with node tactical values into action\cgf\log\<mapname>.csv.
These files can be read with a spread sheet application (MsExcel) for visualization and
further analysis of the map tactical positions.
|
|
show path <nodeid>
|
Displays path from current position to specified node using green laser lines, and
a sequence of node numbers on the console. The laser lines will be present for
about 30 seconds.
Example:
terrain show path 134
Note: if there isn't a path, no path is given. Make sure you have 'log visit'
enabled otherwise CGF won't know your current node.
|
|
show stealthpath <nodeid>
|
Displays path from current position to specified node using green laser lines. The path is
constructed with a preference for stealth and wall hugging. If the path doesn't show sufficient wall hugging,
either there are few walls nearby, or you have not created sufficient links with the nodes
close to the walls, or the walls need to be populated with nodes closer to the wall.
Example:
terrain show stealthpath 134
Note: if there isn't a path, no path is given. Make sure you have 'log visit'
enabled otherwise CGF won't know your current node.
Important: only use this command when you haven't changed the nodes and links
since you loaded the terrain files. Otherwise, the command causes a crash.
|
|
show lonely <maxnodes>
|
Displays the <maxnodes> nodes having the lowest number of neighbors. Nodes appear
as red balls for 45 seconds. These nodes may require more linking (or, less likely, to have
more other nodes closeby), but this need not be the case.
Example:
terrain show lonely 25
Note that the maximum number of nodes made visible is 100.
|
|
show closest <maxnodes>
|
Displays the <maxnodes> nodes being closest to another node. Nodes appear
as red balls for 45 seconds. Some of these nodes are better removed but be careful
not to remove door, glass or ladder nodes (the ladder top sometimes need to be
removed though).
Example:
terrain show close 25
|
|
show infront <maxnodes>
|
Displays the <maxnodes> nodes visible and infront of you. Nodes appear
as red balls for 45 seconds. It provides with you more info on the nodes created
thusfar.
Example:
terrain show infront 25
Note that there might be nearby nodes that you cannot see from your current position;
as a result, these nodes won't appear. You may want to change position, and reissue this
command to get a better overview.
|
|
show linkcandidates <radius>
|
Displays the links within the radius for which only a one-way link is present.
Links appear as green laser lines. Some of these 'linkcandidates' indeed are valid
links and you can add them by travelling between the two nodes. In other cases,
the linkcandidate just denotes an 'unviable' link and you need not add it.
Example:
terrain show linkcandidates 300
Note that many of the links shown aren't good candidates. Just focus on short distance
links that are missing.
|
|
show locations
|
Displays the locations for the mission read (if any). Locations are displayed
as vertical stacks of three blue balls.
You can read a mission without executing it using the command 'mission read <missionname>.cgf'.
|
|
show insolid
|
Displays (on the console) a list of nodes that (in some strange way) have been
created in a solid brush (and are not water, door or glass nodes).
|
For performance reasons, route file creation is not done under the same
circumstances as normal CGF play. So boot up AQ2 with cheats enabled ('+set cheats 1'
on the Quake2 command line), once in game, issue the following commands:
list 1: console commands to start map in the correct way
for route file creation
---------------------------
> set cgf 0
> set teamplay 0
> set deathmatch 1
> set fog 0
> set breakableglass 1
> map mapname
Enabling breakable glass is essential because otherwise, CGF won't be able to annotate
the glass windows with nodes. And without nodes in the windows, the bots will be less
effective at breaking the window.
You may want to enable god mode to prevent dieing when falling off a ledge.
You also may want to set the brightness to the max so you
can actually see where you are walking anywhere on the map.
After loading the map, CGF will report whether a route file was found or not.
Now prepare to start routing with sufficient information:
list 2: console commands to make sure you see the
results of your mapping effort
---------------------------
> terrain log create
> terrain log visit
> terrain display node
I normally don't display links (slows down too much, and creates error messages when
too many entities have been created), but you could give it a try:
terrain display link
Before we start mapping, it's good to know that for the CGF bots, not all locations are
equal. Instead, some locations are very important for these bots to fight well:
- near wall locations (provide more stealth and cover)
- near edge roof locations (make for good defensive positions - plenty to see,
cover when stepping back from the edge)
- potential sniper locations (in windows, dark corners, close to obstacles as
rooftop air vents)
Also remember: in CGF, the waypoints do not serve only for navigation
but for terrain reasoning as well. As a consequence, waypoints should be created everywhere
a human player can get. Though the bots don't use strafe jumping tricks, some humans
might. Please also put nodes at these locations (but make sure the bots cannot get there by
not creating links to those locations).
Because the automatic node creation won't create a new node very close to an existing
one, it is important to wander via the near wall, roof edges, and potential sniper locations
first.
(In case you forget to drop nodes somewhere, you can always drop them there manually).
Start mapping
So move close to a wall start creating your first route file:
list 3: console command to actually start mapping
---------------------------
> terrain map
(Note that the 'terrain link' command isn't required if you toggle mapping on - linking is
set to on automatically in that case).
When you haven't created any nodes for the map at hand, the 'terrain map' command will generate
a number of nodes automatically:
- the node at your position
- nodes at door positions
- nodes at breakable glass positions
You can later recognize these nodes easily by their low node id's
(but also by the description stating DOOR or GLASS node flags).
Now, have a walk and look at the console (and behind you) what's happening.
Saving the route file
After having create a number of nodes and links, it's good to know how to save
our new (but partial) route file. Just type:
list 4: console command to store the (partial) route file
---------------------------
> terrain save
and a route file action\terrain\<mapname>.srp is automatically saved.
Because the map is "post-processed" (cleaned up) before saving, this may take a serious while -
all this time, your Q2 seems to hang (but it is very very busy). Time for coffee, Mountain Dew
or whatever keeps you going.
Since 'terrain save' takes some minutes, you won't like to save very often. However, since
CGF is still beta (not really 24x7 software) you want to save often enough.
After saving, you can continue mapping, or leave the map (and maybe come back to the map later).
It's good to do this to see that we really have created a partial route file:
list 5: console command to leave and re-enter the current map
---------------------------
> map mapname
As a result, the current map (and all mapping state, such as log visit, log create,
display node etc.) is abandoned, and the current map is reloaded. You'll see the map stats and
all further information being displayed during map load time. You indeed created a (partial)
route file.
After loading a map, make sure you use the commands from list 2 and list 3 to continue mapping.
Special Considerations
Some map features require a few special actions. Currently these features
are ladders and 'unreachable areas'.
Ladders
Since, in Quake2, ladders are not entities but just brush texture attributes, ladders cannot be
detected automatically by CGF. Instead, ladders can only be detected when you use them.
Because most mappers apply the LADDER texture on both the front and sides of the ladder,
and because most players and bots climb the ladder front faster than the ladder sides,
it is important that you approach ladders towards front, and look straight at them.
Then, just jump into the ladder... The mapping code will detect the ladder and populate
the whole ladder with nodes and links automatically.
If you manage to screw up and see nodes and links appear at the side of a ladder, or at the
wrong side of the ladder (leading to the ceiling instead of the hole in the ceiling), then
do the following:
list 6: console commands to remove (ladder) nodes
---------------------------
' 1. disable node creation
> terrain map
' should say mapping disabled
' 2. disable node linking
> terrain link
' should say linking disabled
' 3. move to some ladder node
> ... (you move)
' 'log visit' should report you visit a ladder node
' 4. remove ladder node
> terrain manual delete node
' should say node removed
' 5. continue visiting all ladders nodes for this ladder
' and remove them all
> ... (you move and delete)
' 6. move back from ladder
' and enable mapping/linking again
> terrain map
' should say mapping enabled, linking enabled
' 7. move back from ladder
' and enable mapping/linking again
> ... (move into ladder ther right way)
It is advised to map ladders early (and to save after mapping each ladder). This is even more
true for the hard to map drain pipe ladders.
Unreachable areas
Unreachable areas are tricky to map. To get to unreachable locations (for example, the central
tower rooftop at Urban has a spawn point but cannot be reached otherwise; likewise,
Actcity2 has a similar spawn point), use the noclip cheat command and move to that location.
However, before using the noclip command, make sure that you don't link your last visited node
to the new node at the unreachable location. And as soon as you arrive, use noclip again to
drop down to the floor, and enable linking again.
Summarized in commands:
list 7: console command to deal with 'unreachable location'
---------------------------
> terrain link
' should say linking disabled - otherwise, issue again
> noclip
should say 'noclip on'
> ... fly-move to 'unreachable location'
> noclip
should say 'noclip off'
drop down to floor
a new node will be created automatically
> terrain link
' should say linking enabled
> ... continue mapping
If you use god mode, you can just jump down from the unreachable location. Independent of
the results of your jump, CGF is smart enough not to create links for suicide jumps. For
CGF 0.79 and later versions, CGF doesn't link any jumps causing more than 30 falling damage
(and discourages bots to do these jumps).
These commands enable you to get a reasonable 'draft' route file. In the remainder of this manual,
you'll learn how to inspect, modify and improve your route file.
Now you have covered most of the map, it's time to check out have you've done. I check my
routing result the following way:
- verify 'terrain stats', and especially the link counts
- path verification
- use the 'terrain show' query functions
Terrain Stats The node counts and link counts can be inspected using 'terrain stats'.
Similarly styled and sized maps should have similar results. Please use the following table
for reference.
(The table reflects reported map statistics - note
that you cannot simply divide the number of links by the number of nodes to get the
average number of links per node: some of the links are bi-directional, whereas other
are unidirectinal only):
|
mapname
|
nodes
|
links
|
avg. links / node
|
|
actcity2
|
475
|
1493
|
3.14
|
|
urban
|
755
|
2238
|
2.96
|
|
urban2
|
638
|
1962
|
3.08
|
|
city
|
951
|
2799
|
2.94
|
|
downtown
|
725
|
2105
|
2.90
|
|
p1_lightbeam
|
826
|
3180
|
3.85
|
|
monastery
|
759
|
2281
|
3.01
|
|
coverme
|
483
|
1497
|
3.10
|
|
riot
|
575
|
1725
|
3.00
|
This table demonstrates that 'urban' style maps in general have about 3.0 links
per node. Map features that increase the link count are water, many 'low falling damage
jumps' and many traversable obstacles. p1_lightbeam has all of these, and therefor
scores more links per node.
If you notice that you have only 2.5 links per node (avg.), you know you need to run
around some more with linking enabled!
Path Verification An effective way to both check and improve a route file is to display
and traverse paths (adding and removing links where necessary):
- to key positions
- along key obstacles
- to random positions
Key positions are essential for combat. You want to be sure that they are correctly
populated with nodes and that you can efficiently reach these positions from anywhere on the map.
Because the automatic node dropping tries to achieve a uniform distribution of nodes all
over the map, it will not always drop a node at a key position if it already dropped a
node nearby. In that case, you might need to drop an additional node at exactly the right
position, and possibly remove the other nearby node if that one is really close.
The windows at the city map are good examples of where manually nodes were placed. You typically
do something like:
list 8: checking and improving the nodes at a key positions
---------------------------
' move to position overlooking key position
' make visible any nodes around that position
> terrain show infront 30
' nodes appear - move and repeat to make all
' relevant nodes visible
'
' if node needs to be added, move to that position and
> terrain manual drop node
' a node is added, and linked automatically to
' all other nodes that are easy to reach
'
' you can check easily for nodes being too close to each other:
> terrain manual show closest 30
' (show the 30 nodes being closest to another node)
'
' if the nearby node is close, you might want to remove it
' move to the node (log visit says you when you reach it)
> terrain manual delete node
' last visited node is deleted
'
' make sure the new node is reached from all relevant
' nodes by moving to and from the new node
Key positions need not only be populated with nodes, they should also be reachable.
So visit some key positions, write down their node id's, and move to some other location.
Make sure that you have 'terrain link' enabled.
Then issue (for example, from current position 279 to see the path to node 701):
list 9: verify and improve a path
---------------------------
> terrain show path 701
' links appear, and path nodes are visible at console
' for example,
' path == 279, 278, 579, 580, 581, 680, 701
The path listed on the console includes all nodes along the path from your position to
the destination. If there's a shorter path possible (and if the bots are likely to make it
without strafe-jumping, double-jumping or whatever tricks you can but they cannot do),
just walk that path yourself, and the required links will be added.
However, if the path listed is an illegal one, visit the relevant nodes to see what number
(580, 581, or ...) identifies what node. Then, manually remove the erroneous link as follows:
list 10: remove erroneous link
---------------------------
> terrain manual unlink 580 581
' message stating 'unlinked 580 -> 581' should appear
Note that if this path was incorrect, other paths around or thru the obstacle are likely
to be present. Move to other nodes and check all possible paths (from both directions)
until you are sure all remaining links are correct.
At actcity2, I had to remove incorrect links that were created because the fence was not
seen as blocking movement (which it does :) ). See the images above.
Next to key positions, key obstacles need to be verified (and improved or corrected). Typical
candidates to cause trouble are: ladders / drainpipe / climbable lamp posts, doors,
air ducts, crate stacks, and breakable glass.
Read more about these in the next section.
After having dealt with the key positions and key obstacles, I often try to display and
follow paths to 'random' nodes (node id's 50, 100, 150, ... etc.) and will follow that
path (or a shorter path while creating links).
use of additional commands (linkcandidates, closest, lonely) still to be written
The following map features are more likely to cause problems for the bots. They are
discussed one by one, with focus on the problems you're most likely to experience,
and some work arounds to deal with these problems.
Crates stacks, in the current versions,
may cause jumping problems for the bots. The
bots have troubles in mounting a series of crates successfully.
Most of these problems can be worked around by repositioning nodes (manually create
a new one, delete the old one), to enable the bots to successfully jump the stacks.
Take care to position the nodes in the center of the crate (small crates, and large
crates that are not mounted from the floor) and near but not over the edge for larger
crates that are to be mounted from the floor. See the images below:
Doors / breakable glass typically cause the following problems:
- there might be paths that bypass a door / glass node (needed by the bot to understand
how to operate the door / glass) [center image above]
- paths in the vicinity of a door include the door/glass node (urging the bot to
try to open door or break glass while this isn't necessary) [right image above]
- paths going through the doors in opened position [left image below]
- too many nodes close to the doors, so (during patrol) bots restrict the movement
space near the door
The first problem is illustrated in the right side image above. Though during map post-
processing most illegal 'through-door' links are removed, that procedure is not fool proof.
Especially for 'teamed' doors, you need to verify that all paths between nodes on different
sides of the door really include a door node.
In a few cases, the surroundings of doors need to be populated with extra nodes. Since
door nodes are (automatically) among the first to be created, you won't (automatically)
drop another node closeby. However, without that new node, the path meant to by-pass the
door will go via the door and onwards - the bots will open the door for no good reason
(or pick a path circumventing the door node since they consider using doors as slow).
Thus, to have the bots use the terrain close to the door the way you would do, you need
to add another node. See the image above for an example.
In the third case, after opening a rotating door, the bots need to be able to continue
without having to pass thru the rotating door. See the image below for an example.
Finally, do also make sure there are not too many unneeded nodes just in front of door.
This especially hampers bots during patrols - they do not see the stops very close to the
door as a stop not to wait and assemble on.
Fences are another source of problems. CGF tries to
create (in an automatic way) as many links as possible. In most cases, it will not
create links through walls or through corners. However, it is far more likely that
CGF will create links through open fences. You definitely want to verify paths close
to the fence to see whether they pass thru the fence.
ladders
The ideal place to record locations for a mission is in the map itself. And that's what
CGF supports. You can move to a key location, issue the 'location' command and repeat these
steps until you've covered all relevant nodes. Then, issue a mission write command, and
a mission skeleton is written to the action\mission directory. The commands are as follows:
list 11: record locations into a mission skeleton
---------------------------
' move to key location (to be labeled 'casino_entrance')
> location casino_entrance
says location added
' repeat step for other key locations
' ...
' and save mission skeleton to file
' (file labeled 'mapname_test.cgf')
> mission write mapname_test.cgf
says mission written
' now quit and complete the skeleton into a test mission
You'd better complete this mission so it becomes a valid mission (includes objectives
and at least one force, team and member). For valid missions, you are able to load the
mission, display the locations defined, and add locations yourself.
list 12: load, display, add and save mission locations
---------------------------
' load appropriate mission (should compile without errors)
' here, we load actcity2.cgf
> mission read actcity2.cgf
says reading mission done
' now display locations
> terrain show locations
says number of locations displayed
' shows locations as blue 3 ball stacks
'
' ... now move and add your own
> mission location my_own_locations
' ...
> mission write actcity2.cgf
says mission written
When executing (test) missions, you have two important means at your disposal:
- log files (in developer mode only)
- retrieve the "bot-in-troubles" plan of action
Log files are used to report obvious problems during mission start and mission
execution. They can be found in the action\cgf\log directory. Log files are
plain text files, and are given the name of the map: <mapname>.log.
Log entries are made for every mission, and appended at the bottom of the file.
If the log file grows too large, you can throw it away, or remove large parts
of its contents.
For performance reasons, log files are only written when you run CGF in developer
mode. Developer mode is enabled by a 'set developer 1' in the .cfg file used to
launch the bots.
Commercial break: Borderfield's CGF Mission Editor
has built-in support to enable developer mode (in the Options, AQ2 Settings menu) and to
view the log file for the current mission (in the Project menu, View Log option).
With the CGF Launcher, before launching the mission, select Edit Script, and add
'set developer 1'.
The log file entries for a specific mission might look like this (I screwed up a
location position by writing down incorrect coordinates, and had the bots move
to an unreachable roof):
mission# | time | mission = "actcity2_sample.cgf"
=========|=========|========================================================
00000000 | 2.4 | mission started
00000000 | 2.4 | location "motel_lobby" incorrect (no nearby node)!
00000000 | 2.4 | location definitions verified: 1 errors!
00000000 | 66.0 | no path from 448 to 290
Note that not all reported problems are due to terrain file errors. If the script
tries to move a CGF team to an unreachable location (as was the case in the log
entry above), the missing path is indeed absent for the right reasons: you cannot
get to the high sniper roof in actcity2 unless you start out there.
When a specific bot is in trouble (he's stuck), you might want to get into his
brain and at least see what's on his mind. That's possible with CGF - you can
dump a bot's current plan into the action\cgf\log directory as follows:
list 13: dump a bot plan for later analysis
---------------------------
' while running a mission where bot Alpha-1 seems stuck
> plan Alpha-1
' now dumps plan into file
' action\cgf\log\plan_Alpha-1.txt
You can inspect this plan file with a text editor. The plan may look very complex
or as simple as this:
SubPlotAction "Move To Location" [
Sequence
[
NormalMoveToLocation(-88,1199,24) // at node = 259
NormalMoveToLocation(-159,1121,24) // at node = 281
NormalMoveToLocation(-129,973,24) // at node = 241
NormalMoveToLocation(-149,933,24) // at node = 288
>> NormalMoveToLocation(-16,1380,408) // at node = 289
NormalMoveToLocation(-115,1378,408) // at node = 290
NormalMoveToLocation(-72,1414,408) // near node = 290, d = 55.6987
] // Sequence
] // SubPlot
The bot's plan normally consists of a sequence of actions. There's no need to
understand all of it, but for a few details:
The chevron >> symbol depicts the action the bot was executing at the
time you asked for the plan. The bot thus came from node 288, and is stuck trying
to get to 289 (a much higher location). The link between 288 and 289 thus
deserves some closer attention.
Note that if you dump the bot plan when the bot is repeatedly failing to tackle
some obstacle, the chevron symbol is likely not to point to the problematic
movement. In that case, you can write down the problematic path (the 5 nodes
preceding the chevron, and the 5 nodes succeeding it) and inspect that path.
CGF gamers will search the internet to find and download the route file for their favorite map.
And then, when they are ready to fight some good missions against the bots, nothing
is more dissappointing than discovering that the bots get stuck way too often, and don't
access certain key parts of the map at all. The great missions they've downloaded
just s@ck in their opinion.
Remember that a route file, created by one guy, will be downloaded and used by hundreds
of gamers. Remember that a bad route file breaks the CGF gameplay. And remember that
most of these gamers exspect that you've done your job. More specifically, they expect:
- the .zip containing the route file to install like any other Action extension;
- the .zip to contain solely the essential route files (the <mapname>.srp file
and the <mapname>.exp file only when you've played a set of over 50
varying missions on the map using this exact .srp file);
- the .zip to contain a .txt file that describes who you are, where to find you
(email) for thanks, comments and suggestions, and any problems you couldn't
solve;
- the .zip to contain a sample mission defining the key locations and areas,
so they themselves can write missions based on your route file. This sample
mission can be the test mission you have used to verify the bots navigation
in the map;
- the route file to be of good quality (see below). They exspect you not to
release the route file until it's good enough;
- the .zip to contain a fog preferences file fitting the map. The route file will
probably enable the gamer to play CGF on that map for the first time - he might
as well start with some decent fog settings.
In more detail, a .zip route file archive has the following contents for a map
(for example, actcity2):
- .\terrain\actcity2.srp
the only essential route file
- .\terrain\actcity2.txt
text describing file, author and other relevant info
- .\terrain\actcity2.exp
recorded combat experience (only when you've
ran over 50 varying missions using the exact .srp file distributed, otherwise,
leave it out)
- .\missions\actcity2_sample.cgf
sample / test mission
- .\cgf\fog\actcity2.fog
(text) fog preferences file
The text file accompanying the route file should look like this:
=======================================================================================
Title : CGF Terrain file for Actcity2
Filename : actcity2_cgf_terrain.zip
Version / Date : 1.0 / August 25, 1999
Game : CGF for Action Quake 2
Author : William
Email Address : [email protected]
=======================================================================================
* Construction *
Base : -
Construction Time : 3 hours
Limitations / Bugs : secrets doors not mapped (since bots cannot use secret doors)
Unless you really want to copyright your route file (a related copyright fight would
make an interesting case in court), this is all you need.
The sample mission, serving both as a base for further mission development and
as a demonstration of the route file's quality, should define:
- all relevant locations, preferably by a recognizeable name (augmented by some
ASCII art map that explains what you mean by the 'just_underneath_brown_tower')
- all relevant areas
- a single force, containing a single team, containing a single bot member.
For example:
force "Spec Ops"
{
team "Breach Team Alpha"
{
npc "Alpha-1" "male/sabotage"
{
weapon "Dual MK23 Pistols";
item "Lasersight";
ammo "M4 Clip" = 2;
skill = 2;
};
};
};
- a single objective (since at least one objective is required).
For example:
objectives
{
failure
("Spec Ops",
"\nyawn...\nthis is taking way too long"
)
= timeout(300)
-> {"actcity2_sample.cgf"};
};
- a single plan for the sole team, inserting the bot somewhere, and having the
bot deal with all important obstacles. Typically, that means, the bot handles
rotating doors from the side the door opens to, and that the bot uses all
ladders present. For example (as used for p1_lightbeam):
plan "Breach Team Alpha"
{
insert at indoor_meetingroom using "column";
wait until ready;
wait 5;
moveup to outdoors_wall_nearwaterladder using "column";
wait until ready;
wait 5;
moveup to indoor_meetingroom using "column";
wait until ready;
wait 5;
moveup to indoor_pcroom using "column";
wait until ready;
wait 5;
moveup to vacant_camper_parkingstop using "column";
wait until ready;
wait 5;
moveup to nearcamper_slopingroof using "column";
wait until ready;
wait 5;
moveup to indoor_meetingroom using "column";
wait until ready;
wait 5;
};
You would observe the bot using the AQ2 built-in chase cam. The additional 'wait 5' delays make it
easier to see what the bot is doing.
A CGF terrain file is of good quality when all the above mentioned conditions have been met,
and:
- the bot successfully (and consistently) manages to execute the plan in the sample
mission
- all relevant parts of the map are covered with nodes and links. On average you'll
have about 2.8 avg. links per node on flat maps, and > 3 avg. links on maps
featuring many height levels or water.
- when run in 'developer' mode ('set developer 1'), the most recent log messages for the map
(in cgf\log\<mapname>.log) do not include any errors.
A fog preferences file (action\cgf\fog\actcity2.fog) would look like this:
// format: mapname density fog_type red green blue begin end
// - density: 0.00 -> no fog
// density normally in range 0.05 ... 0.20
// - fog_type: 0 = exp (fog linear with distance)
// 1 = exp2 (fog increasing more than linear)
// 2 = linear (fog linear within specific begin-end range)
// - red/green/blue in range [0.0 .. 1.0]
// - begin: start distance for linear fog (no fog within begin dist)
// - end : end distance for linear fog (no vision beyond end dist)
actcity2 0.10 2 0.50 0.50 0.45 200 1600
For more info on CGF and fog, visit the fog documentation.
This manual was significantly improved because of the input of Dominic Rutter, Janne Heikkinnen,
and Ryan McAleese.
|
date
|
D
|
description (incl. link)
|
|
Oct 22, 2000
|
+
|
fixed error in listing 11 ('mission' should not prefix location)
|
|
Sep 28, 1999
|
+
|
explained why to map enable breakable glass
|
|
Sep 22, 1999
|
+
|
explained why to map some inaccessible locations
|
|
Sep 15, 1999
|
+
|
added terrain show insolid command,
|
|
Sep 14, 1999
|
+
|
manual delete node now also accepts nodeid of node to delete
|
|
Sep 11, 1999
|
+
|
added terrain export command
|
|
Sep 10, 1999
|
+
|
added more map statistics,
added 'how NOT to' shots for doors
|
|
Sep 2, 1999
|
+
|
included fog support consequenes: files,
initial settings and requirements
|
|
Aug 27, 1999
|
+
|
added door problems
|
|
Aug 25, 1999
|
+
|
added illustrations, added advanced routing + debugging
|
|
Aug 23, 1999
|
+
|
first hmtl version, new facilities described
|
|
July 15, 1999
|
+
|
initial version
|
|
 |